




Yizhou Zhao won the NVIDIA #ExtendOmniverse contest with his "IndoorKit" for robotics simulation environments, enabling anyone to bring simulated bots to life with ease.
Contest participants were tasked with using the integrated development environment (IDE) of Omniverse Code and Omniverse while creating an extension that would benefit the community. The IndoorKit lets users click basic functions such as "add object," "add house," "load scene," "record scene," and similar buttons to easily environment aspects for the simulation.
Zhao is a Ph.D. student in statistics at UCLA and won the code contest aimed towards programmers, developers, engineers, technical artists, hobbyists and researchers - with the aim of creating Python-based tools for use in the metaverse.
Omniverse was a suitable asset for Zhao as he worked on designing algorithms that could be used for AI experiments despite the fact he didn't have direct access to a robot or experimental room for testing. However, he was able to simulate it using his IndoorKit extension - in an environment that offered a range of variability and randomness.
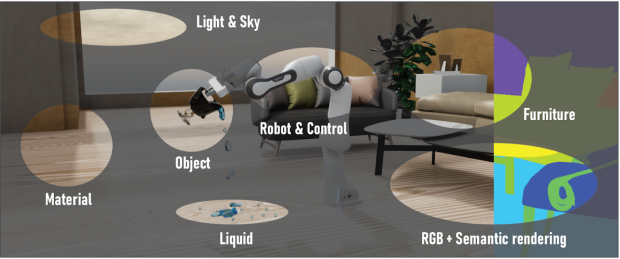
The shared Omniverse is an open virtual space that allows for tools, assets, and projects that can be worked on collaboratively in a virtual world. Zhao's extension makes it possible for users to create a robot task, control the robot, and bring variety to an indoor scene in a streamlined manner.
Zhao noted: "Typically, it's hard to deploy a robotics task in simulation without a lot of skills in scene building, layout sampling and robot control. By bringing assets into Omniverse's powerful user interface using the Universal Scene Description framework, my extension achieves instant scene setup and accurate control of the robot."
The IndoorKit in action:
Although the contest is over, interested parties are still welcome to download Omniverse, build an extension, publish the code, create a video, and share it with the community.
NVIDIA has high hopes for its Omniverse platform - using the Omniverse Cloud, researchers and teams can collaboratively design 3D workflows without required local computing power. This allows for greater scalability and accessibility while training, simulating, testing, and deploying their AI-enabled intelligent projects.
 China's CXMT is on track to nearly match Micron's DRAM production capacity by the end of 2026
China's CXMT is on track to nearly match Micron's DRAM production capacity by the end of 2026 NVIDIA's RTX 50 Super GPUs have reached board partners, but launch is on hold over 3GB GDDR7 pricing
NVIDIA's RTX 50 Super GPUs have reached board partners, but launch is on hold over 3GB GDDR7 pricing Amazon's God of War series is recasting Kratos after Ryan Hurst suffered an on-set injury
Amazon's God of War series is recasting Kratos after Ryan Hurst suffered an on-set injury Physical games don't matter to GameStop, CEO says
Physical games don't matter to GameStop, CEO says GameStop CEO Ryan Cohen wants to buy eBay and build out an in-game digital marketplace
GameStop CEO Ryan Cohen wants to buy eBay and build out an in-game digital marketplace KB5101650 Windows 11 update is causing some Dell PCs to shut down unexpectedly
KB5101650 Windows 11 update is causing some Dell PCs to shut down unexpectedly Bethesda on Elder Scrolls VI, Fallout 5 Xbox exclusivity: 'It's too early to comment'
Bethesda on Elder Scrolls VI, Fallout 5 Xbox exclusivity: 'It's too early to comment' Assassin's Creed Black Flag Resynced makes in one day what Shadows took four days to earn
Assassin's Creed Black Flag Resynced makes in one day what Shadows took four days to earn Bethesda gives news on Elder Scrolls 6, confirms 4 Fallout projects, new Starfield content
Bethesda gives news on Elder Scrolls 6, confirms 4 Fallout projects, new Starfield content GTA 6 can be ordered and delivered through Uber Eats
GTA 6 can be ordered and delivered through Uber Eats SteelSeries Arctis Nova 7 Wireless Gen 2 Headset Review - New and Improved, But Is It Enough?
SteelSeries Arctis Nova 7 Wireless Gen 2 Headset Review - New and Improved, But Is It Enough? AMD Ryzen 7 7700X3D Review - Days of Future Past
AMD Ryzen 7 7700X3D Review - Days of Future Past Samsung 990 2TB SSD Review - Ninth Gen QLC at PCIe Gen4 Speeds
Samsung 990 2TB SSD Review - Ninth Gen QLC at PCIe Gen4 Speeds ASUS ExpertBook Ultra (Panther Lake) 14" Business Laptop Review
ASUS ExpertBook Ultra (Panther Lake) 14" Business Laptop Review ASUS ROG Raikiri II Xbox Wireless Controller Review - Ready to Take Control
ASUS ROG Raikiri II Xbox Wireless Controller Review - Ready to Take Control MOZA FMP18 Panel Bundle Review: authentic F/A-18 Hornet cockpit controls for flight sims
MOZA FMP18 Panel Bundle Review: authentic F/A-18 Hornet cockpit controls for flight sims Micron 6600 ION 245.76TB Enterprise SSD Review - Best in Class Programming Speeds
Micron 6600 ION 245.76TB Enterprise SSD Review - Best in Class Programming Speeds MOZA MA3F EFCM Flight Control Module Review: authentic Airbus A320 autopilot panel for simulators
MOZA MA3F EFCM Flight Control Module Review: authentic Airbus A320 autopilot panel for simulators Turtle Beach Stealth Pro II Wireless Gaming Headset Review - Premium Sound, Fantastic Features
Turtle Beach Stealth Pro II Wireless Gaming Headset Review - Premium Sound, Fantastic Features MOZA MGX1000 Instrument Panel Review: a realistic Garmin G1000 replica for immersive flight sims
MOZA MGX1000 Instrument Panel Review: a realistic Garmin G1000 replica for immersive flight sims Hisense U6SF 65-inch MiniLED TV: High Performance Meets Leisurely Convenience
Hisense U6SF 65-inch MiniLED TV: High Performance Meets Leisurely Convenience I stopped digging through Windows menus after I set up this one folder
I stopped digging through Windows menus after I set up this one folder Don't sell your Windows laptop until you do these things
Don't sell your Windows laptop until you do these things 6 PC cleaning mistakes to avoid for safer hardware maintenance
6 PC cleaning mistakes to avoid for safer hardware maintenance Phison and Intel Take Aim at Local AI's Memory Wall with aiDAPTIV
Phison and Intel Take Aim at Local AI's Memory Wall with aiDAPTIV How to Remap Keyboard Keys in Windows using Microsoft PowerToys
How to Remap Keyboard Keys in Windows using Microsoft PowerToys 7 tips to organize your Windows files for faster, easier access
7 tips to organize your Windows files for faster, easier access Intel Arc G3 Extreme first impressions with MSI's Claw 8 EX AI+ - Incredible power for an extreme price
Intel Arc G3 Extreme first impressions with MSI's Claw 8 EX AI+ - Incredible power for an extreme price How to fix Wi-Fi Adapter Not Working on Windows laptops: troubleshooting tips
How to fix Wi-Fi Adapter Not Working on Windows laptops: troubleshooting tips Hisense U7SG 4K TV: Modern Entertainment for the New Age
Hisense U7SG 4K TV: Modern Entertainment for the New Age