


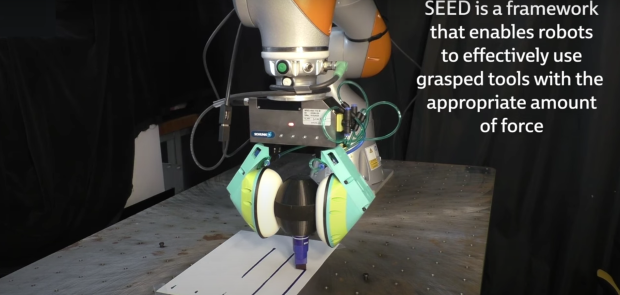

MIT researchers have developed a new soft robotics platform able to grip items such as tools using the appropriate amount of force. The Series Elastic End Effectors (SEED) has been designed to allow robots to carry out tasks that require the application of force of a grasped tool with proper pressure.
Robotic advancements are still ongoing, but traditional rigid robots still have difficulty completing tasks that are easy for humans. To complement robots, SEED uses embedded cameras and soft bubble grippers that use deformation that is carefully mapped. Everything the robot senses can be tracked in real-time in a 3D image that changes shape around a particular object that is being used - and each experience can be later utilized as a learned model.
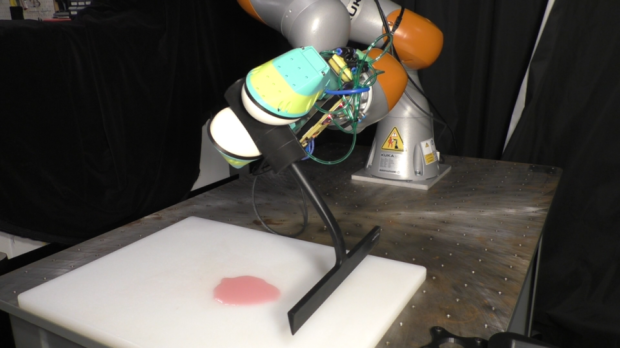
SEED makes it possible for robots to successfully move objects with six degrees of freedom so it can move an object back and forth, up or down, left or right, roll, yaw, and pitch. Tasks demonstrated included how to set a screw to the proper torque, use a squeegee to clean up a spill, and write with a marker.
The MIT Computer Science and Artificial Intelligence Laboratory (CSAIL) worked with researchers from the Toyota Research Institute (TRI) to develop the SEED system.
"Nobody will be surprised that compliance can help with tools, or that force sensing is a good idea; the question here is where on the robot the compliance should go and how soft it should be. Here we explore regulating a quite-soft six degree-of-freedom stiffness directly at the hand/tool interface, and show that there are some nice advantages to do that."
Of course, there is still plenty of work left to be done, as the SEED system currently can only deal with specific tool geometry. The tool must be cylindrical, although future updates may support other shapes so a wider variety of tools can be supported.
MIT's SEED system in action:

 Figure's robots now walk a little less like C-3PO, thanks to reinforcement learning
Figure's robots now walk a little less like C-3PO, thanks to reinforcement learning Qualcomm's Snapdragon C wants to bring the MacBook Neo fight to the $300 Windows laptop market
Qualcomm's Snapdragon C wants to bring the MacBook Neo fight to the $300 Windows laptop market Starfield comes to PS5 on April 7 for $50, new story DLC Terran Armada launches same day
Starfield comes to PS5 on April 7 for $50, new story DLC Terran Armada launches same day Opinion: Sony could make a native PS4 handheld to carry multi-gen legacy into the future
Opinion: Sony could make a native PS4 handheld to carry multi-gen legacy into the future Band explodes in popularity overnight has a big secret that could sink them
Band explodes in popularity overnight has a big secret that could sink them RAM crisis is getting worse, Valve engineer warns
RAM crisis is getting worse, Valve engineer warns Xbox's return to exclusives was decided 'very early on' by CEO Asha Sharma
Xbox's return to exclusives was decided 'very early on' by CEO Asha Sharma Xbox console exclusives can include multiplayer games too
Xbox console exclusives can include multiplayer games too Assassin's Creed Black Flag Resynced sells over 3 million copies, New Game+ is coming
Assassin's Creed Black Flag Resynced sells over 3 million copies, New Game+ is coming Modder plays GTA Vice City and GTA III on a TV inside GTA San Andreas
Modder plays GTA Vice City and GTA III on a TV inside GTA San Andreas Enthusiast puts 11 fans and an AiO on an RTX 3080, gains only 4 FPS
Enthusiast puts 11 fans and an AiO on an RTX 3080, gains only 4 FPS Spotify removed 75 million AI-generated tracks in 2025 as it cracks down on royalty abuse
Spotify removed 75 million AI-generated tracks in 2025 as it cracks down on royalty abuse YouTuber claims Sony is using social media bots to push back against backlash over its physical disc announcement
YouTuber claims Sony is using social media bots to push back against backlash over its physical disc announcement Apple's first OLED iPad mini could launch as early as October
Apple's first OLED iPad mini could launch as early as October Ryzen 7 7700X3D outperforms Ryzen 7 5800X3D with just one stick of DDR5, making AM4 a terrible option for your next build
Ryzen 7 7700X3D outperforms Ryzen 7 5800X3D with just one stick of DDR5, making AM4 a terrible option for your next build SteelSeries Arctis Nova 7 Wireless Gen 2 Headset Review - New and Improved, But Is It Enough?
SteelSeries Arctis Nova 7 Wireless Gen 2 Headset Review - New and Improved, But Is It Enough? AMD Ryzen 7 7700X3D Review - Days of Future Past
AMD Ryzen 7 7700X3D Review - Days of Future Past Samsung 990 2TB SSD Review - Ninth Gen QLC at PCIe Gen4 Speeds
Samsung 990 2TB SSD Review - Ninth Gen QLC at PCIe Gen4 Speeds ASUS ExpertBook Ultra (Panther Lake) 14" Business Laptop Review
ASUS ExpertBook Ultra (Panther Lake) 14" Business Laptop Review ASUS ROG Raikiri II Xbox Wireless Controller Review - Ready to Take Control
ASUS ROG Raikiri II Xbox Wireless Controller Review - Ready to Take Control MOZA FMP18 Panel Bundle Review: authentic F/A-18 Hornet cockpit controls for flight sims
MOZA FMP18 Panel Bundle Review: authentic F/A-18 Hornet cockpit controls for flight sims Micron 6600 ION 245.76TB Enterprise SSD Review - Best in Class Programming Speeds
Micron 6600 ION 245.76TB Enterprise SSD Review - Best in Class Programming Speeds MOZA MA3F EFCM Flight Control Module Review: authentic Airbus A320 autopilot panel for simulators
MOZA MA3F EFCM Flight Control Module Review: authentic Airbus A320 autopilot panel for simulators Turtle Beach Stealth Pro II Wireless Gaming Headset Review - Premium Sound, Fantastic Features
Turtle Beach Stealth Pro II Wireless Gaming Headset Review - Premium Sound, Fantastic Features MOZA MGX1000 Instrument Panel Review: a realistic Garmin G1000 replica for immersive flight sims
MOZA MGX1000 Instrument Panel Review: a realistic Garmin G1000 replica for immersive flight sims I use this decade-old free tool that finds files faster than Windows Search does
I use this decade-old free tool that finds files faster than Windows Search does I install and update most of my apps with this Windows command now, and I stopped downloading sketchy installers
I install and update most of my apps with this Windows command now, and I stopped downloading sketchy installers Hisense U6SF 65-inch MiniLED TV: High Performance Meets Leisurely Convenience
Hisense U6SF 65-inch MiniLED TV: High Performance Meets Leisurely Convenience I stopped digging through Windows menus after I set up this one folder
I stopped digging through Windows menus after I set up this one folder Don't sell your Windows laptop until you do these things
Don't sell your Windows laptop until you do these things 6 PC cleaning mistakes to avoid for safer hardware maintenance
6 PC cleaning mistakes to avoid for safer hardware maintenance Phison and Intel Take Aim at Local AI's Memory Wall with aiDAPTIV
Phison and Intel Take Aim at Local AI's Memory Wall with aiDAPTIV How to Remap Keyboard Keys in Windows using Microsoft PowerToys
How to Remap Keyboard Keys in Windows using Microsoft PowerToys 7 tips to organize your Windows files for faster, easier access
7 tips to organize your Windows files for faster, easier access Intel Arc G3 Extreme first impressions with MSI's Claw 8 EX AI+ - Incredible power for an extreme price
Intel Arc G3 Extreme first impressions with MSI's Claw 8 EX AI+ - Incredible power for an extreme price