



A new patent filed by Take-Two Interactive in October 2020 sheds light on possible next-gen NPC tech in Grand Theft Auto 6.

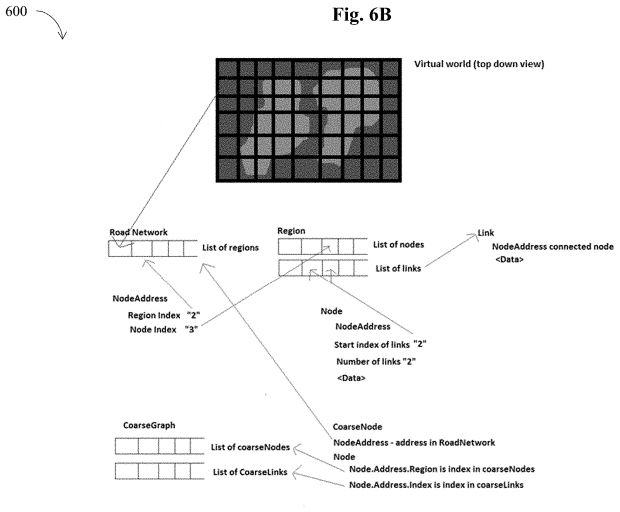
The patent itself is immensely technical and describes new advanced methods to improve in-game NPC movement schemes and virtual navigation. The documents are actually pretty illuminating and highlight how NPC systems actually work in Rockstar's games; the NPCs and vehicles move linearly across nodes throughout the game world.
The information is admittedly difficult to decipher, but the main gist seems to be that Take-Two (and by extension, Rockstar Games) wants to find ways to enhance its NPC systems to allow more immersion and realistic interactions. This ranges from how characters move, what they do, how they collide and interact with the game world, and how NPCs drive across huge metropolises. The document specifically focuses on vehicles and strongly indicates that Grand Theft Auto 6 (and other Take-Two games) will have next-level NPC AI, especially when it comes to vehicles.
Pathfinding and subsequent node traversal will be streamlined based on rendered frames, and NPCs will be a lot less dumb. They'll move out of your way during a high-speed chase, for example, and react much more realistically to what you're doing--and what other NPCs are doing--around them.
Another interesting tidbit is the inventors of the patent both work at Rockstar: David Hynd is associated director of technology, and Simon Parr is lead AI programmer at Rockstar Games.
Here's some of the relevant parts of the patent:
A node-based vehicle in conventional video games may make arbitrary decisions at junctions (wandering behavior). These node-based vehicles may not consider certain factors--such as traffic--when determining navigation. For example, some systems rely on low level vehicle avoidance to only have NPCs avoid vehicles and objects directly around it. This cannot account for changing lanes when parking cars, anticipating a road exit, weather conditions, and the like.
Furthermore, conventional systems only provide limited resources for automating NPCs. For example, processing power, memory, and efficiency only allow for a predetermined number of NPC controlled cars in any single instance of a conventional system.
As an additional drawback, conventional systems relied almost entirely on local traffic avoidance for NPCs to avoid collisions. This involves, each frame, checking the local environment for any potential obstructions (vehicles, pedestrians, objects), building up a view of that obstruction from the local vehicle (creating a `front facing` polygon which is a list of points/lines that the vehicle will need to avoid in order to not hit the obstruction), generating information about the road the vehicle is on so they can avoid going off-road into buildings and finally generating and detecting the best steering angle to avoid all the obstructions. This is done every frame for each entity and no knowledge of the previous frame is used. This can result in very late detection of potential issues and no high level knowledge of `this road is blocked;` instead, the system only indicates that there's something in my way to be avoided. Vehicles cannot plan accordingly, for example, if there is any type of road blockage.
In view of the foregoing, a need exists for an improved system for virtual navigation in an effort to overcome the aforementioned obstacles and deficiencies of conventional video game systems.
In yet another embodiment, NPCs can also account for exigent circumstances, such as a high-speed chase. For example, in addition to using local avoidance based on the coarse graph 200, splines can be generated through ambient traffic. In other words, vehicles in the virtual world that are obeying traffic laws are used to generate routes through/around them. A list of ambient traffic in the area can be generated and for each vehicle, information related to the subject NPC is recorded. For example, the space between two vehicles, relative direction of travel, velocity differences, and so on. Based on this information, a route can be plotted towards the final destination.

 Valve reportedly in the optimization phase of Half-Life 3: new NPC AI behavior sounds next-gen
Valve reportedly in the optimization phase of Half-Life 3: new NPC AI behavior sounds next-gen Grand Theft Auto 6 mission design has more freedom, Rockstar has 'raised the bar again'
Grand Theft Auto 6 mission design has more freedom, Rockstar has 'raised the bar again' NVIDIA showed me its digital humans and it could be the most exciting gaming tech in 10 years
NVIDIA showed me its digital humans and it could be the most exciting gaming tech in 10 years Half-Life 3 announcement close? Voice actor for G-Man teases the return of Half-Life in 2025
Half-Life 3 announcement close? Voice actor for G-Man teases the return of Half-Life in 2025 EA wants studios to start planning for in-game ads during development
EA wants studios to start planning for in-game ads during development God of War creator says AAA games are becoming worse due to over-emphasis on storytelling
God of War creator says AAA games are becoming worse due to over-emphasis on storytelling MSI introduces 'V1' RTX 5060 graphics cards with larger GB205 Blackwell die
MSI introduces 'V1' RTX 5060 graphics cards with larger GB205 Blackwell die 75% of PlayStation 3 games can now be fully completed on PC, per RPCS3
75% of PlayStation 3 games can now be fully completed on PC, per RPCS3 PlayStation 6 will reportedly ditch the PS5's liquid metal cooling in favor of something else
PlayStation 6 will reportedly ditch the PS5's liquid metal cooling in favor of something else GeForce RTX 50 Series hotspot temperature readings won't be added to MSI Afterburner
GeForce RTX 50 Series hotspot temperature readings won't be added to MSI Afterburner Samsung is using titanium to finally tackle the foldable crease problem with the Galaxy Z Fold 8
Samsung is using titanium to finally tackle the foldable crease problem with the Galaxy Z Fold 8 PALIT introduces GeForce RTX 3060 Infinity 2 OC GPU, a 'brand new' design
PALIT introduces GeForce RTX 3060 Infinity 2 OC GPU, a 'brand new' design A hacked Xbox player beat Microsoft in court after it suspended his account and told him to buy his games again
A hacked Xbox player beat Microsoft in court after it suspended his account and told him to buy his games again Dead Space creator Glen Schofield announces retirement after 35 years in the video game industry
Dead Space creator Glen Schofield announces retirement after 35 years in the video game industry AMD Ryzen 7 7700X3D Review - Days of Future Past
AMD Ryzen 7 7700X3D Review - Days of Future Past Samsung 990 2TB SSD Review - Ninth Gen QLC at PCIe Gen4 Speeds
Samsung 990 2TB SSD Review - Ninth Gen QLC at PCIe Gen4 Speeds ASUS ExpertBook Ultra (Panther Lake) 14" Business Laptop Review
ASUS ExpertBook Ultra (Panther Lake) 14" Business Laptop Review ASUS ROG Raikiri II Xbox Wireless Controller Review - Ready to Take Control
ASUS ROG Raikiri II Xbox Wireless Controller Review - Ready to Take Control MOZA FMP18 Panel Bundle Review: authentic F/A-18 Hornet cockpit controls for flight sims
MOZA FMP18 Panel Bundle Review: authentic F/A-18 Hornet cockpit controls for flight sims Micron 6600 ION 245.76TB Enterprise SSD Review - Best in Class Programming Speeds
Micron 6600 ION 245.76TB Enterprise SSD Review - Best in Class Programming Speeds MOZA MA3F EFCM Flight Control Module Review: authentic Airbus A320 autopilot panel for simulators
MOZA MA3F EFCM Flight Control Module Review: authentic Airbus A320 autopilot panel for simulators Turtle Beach Stealth Pro II Wireless Gaming Headset Review - Premium Sound, Fantastic Features
Turtle Beach Stealth Pro II Wireless Gaming Headset Review - Premium Sound, Fantastic Features MOZA MGX1000 Instrument Panel Review: a realistic Garmin G1000 replica for immersive flight sims
MOZA MGX1000 Instrument Panel Review: a realistic Garmin G1000 replica for immersive flight sims Simagic Zeus Formula Steering Wheel Review: premium build and advanced inputs for F1 racing
Simagic Zeus Formula Steering Wheel Review: premium build and advanced inputs for F1 racing I stopped digging through Windows menus after I set up this one folder
I stopped digging through Windows menus after I set up this one folder Don't sell your Windows laptop until you do these things
Don't sell your Windows laptop until you do these things 6 PC cleaning mistakes to avoid for safer hardware maintenance
6 PC cleaning mistakes to avoid for safer hardware maintenance Phison and Intel Take Aim at Local AI's Memory Wall with aiDAPTIV
Phison and Intel Take Aim at Local AI's Memory Wall with aiDAPTIV How to Remap Keyboard Keys in Windows using Microsoft PowerToys
How to Remap Keyboard Keys in Windows using Microsoft PowerToys 7 tips to organize your Windows files for faster, easier access
7 tips to organize your Windows files for faster, easier access Intel Arc G3 Extreme first impressions with MSI's Claw 8 EX AI+ - Incredible power for an extreme price
Intel Arc G3 Extreme first impressions with MSI's Claw 8 EX AI+ - Incredible power for an extreme price How to fix Wi-Fi Adapter Not Working on Windows laptops: troubleshooting tips
How to fix Wi-Fi Adapter Not Working on Windows laptops: troubleshooting tips Hisense U7SG 4K TV: Modern Entertainment for the New Age
Hisense U7SG 4K TV: Modern Entertainment for the New Age 6 underrated Microsoft Word features worth using to boost your productivity
6 underrated Microsoft Word features worth using to boost your productivity